Kinematic Approach of Adding Two Degree of Freedom to 6-DoF Robotic Arm with an IoT End-Effector
- Facultad de Ingeniería, UNITEC, San Pedro Sula, Honduras
Contacto: [email protected]
Conflicto de interés: Sin conflictos
Kinematic Approach of Adding Two Degree of Freedom to 6-DoF Robotic Arm with an IoT End-Effector
Antecedentes
La revolución de la Industria 4.0 ha impulsado la integración del Internet de las Cosas (IoT) en diversos sectores industriales. Dentro de este contexto, surge el concepto del Internet de las Cosas Robóticas (IoRT), que permite el control y monitoreo de robots de forma remota, mejorando su eficiencia, seguridad y adaptabilidad.
Se han realizado investigaciones previas en efectores finales y grippers inteligentes, así como en la aplicación de protocolos de comunicación como MQTT para conectar sensores, actuadores y microcontroladores con interfaces gráficas.
Objetivos
- Diseñar y desarrollar un efector final con dos grados de libertad para un brazo robótico de seis grados de libertad, incorporando conectividad IoT para su control y monitoreo remoto a través de Node-RED y el protocolo MQTT.
Metodología
Se diseñó el efector final utilizando SolidWorks, realizando simulaciones mecánicas para validar su resistencia ante cargas de 3 libras. El controlador fue diseñado en Proteus y programado con Arduino IDE sobre un microcontrolador ESP32, capaz de conectarse a redes WiFi. Se empleó Node-RED en una Raspberry Pi como servidor local que gestiona la comunicación IoT mediante MQTT. La programación se dividió en recepción de comandos para servo motores y transmisión de datos de un sensor MPU6050 hacia la interfaz gráfica.
Resultados
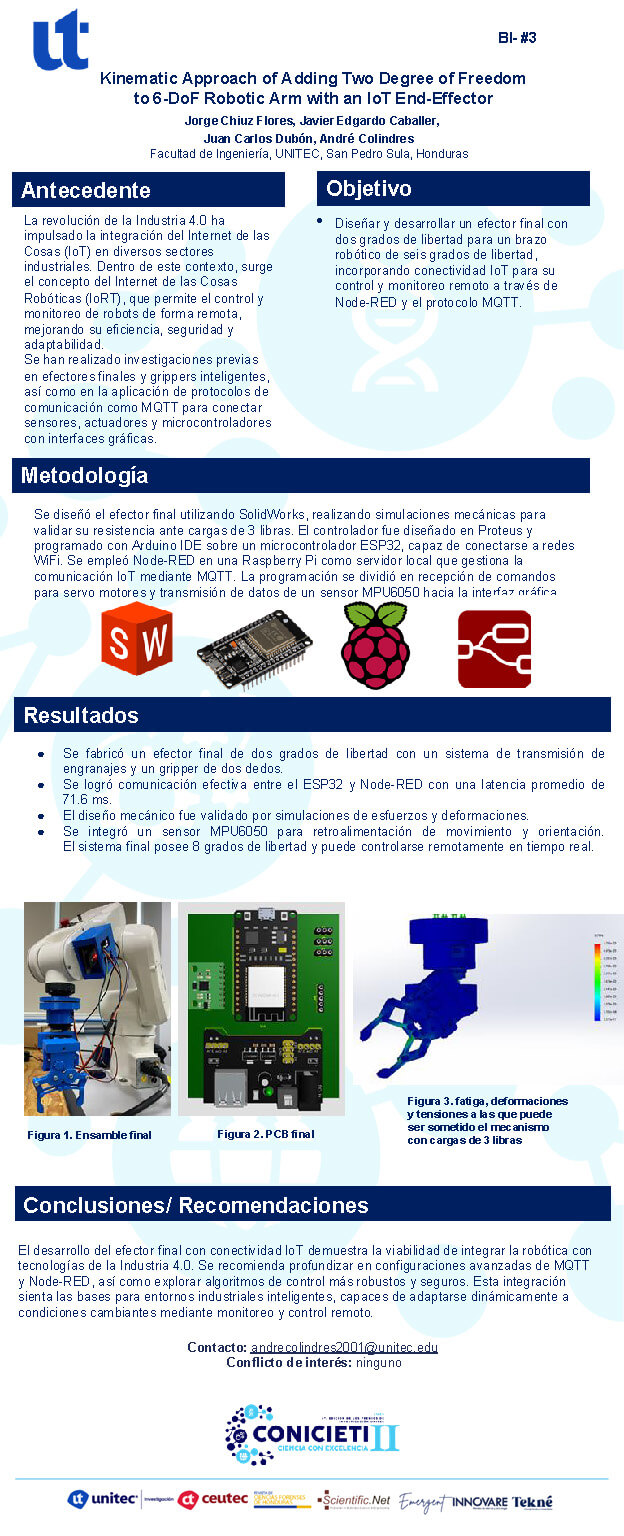
- Se fabricó un efector final de dos grados de libertad con un sistema de transmisión de engranajes y un gripper de dos dedos.
- Se logró comunicación efectiva entre el ESP32 y Node-RED con una latencia promedio de 71.6 ms.
- El diseño mecánico fue validado por simulaciones de esfuerzos y deformaciones.
- Se integró un sensor MPU6050 para retroalimentación de movimiento y orientación. El sistema final posee 8 grados de libertad y puede controlarse remotamente en tiempo real.
Conclusiones/Recomendaciones
El desarrollo del efector final con conectividad IoT demuestra la viabilidad de integrar la robótica con tecnologías de la Industria 4.0. Se recomienda profundizar en configuraciones avanzadas de MQTT y Node-RED, así como explorar algoritmos de control más robustos y seguros. Esta integración sienta las bases para entornos industriales inteligentes, capaces de adaptarse dinámicamente a condiciones cambiantes mediante monitoreo y control remoto.