SandKBot: Prototype All-Terrain Vehicle for Beach Bottle and CanCollection
- Faculty of Engineering, Universidad Tecnológica Centroamericana Unitec, Tegucigalpa, Honduras
Contacto: [email protected]
Conflicto de interés: Sin conflictos
SandKBot: Prototipo de vehículo todoterreno para la playa. Recolección de botellas y latas.
Abstract
The SandKBot project tackles beach pollution in Honduras by deploying a remote-controlled, all-terrain robot to collect nonbiodegradable waste like cans and bottles. Designed for sandy and uneven terrain, it reduces manual cleanup and promotes sustainability. Field tests showed effective debris collection and navigation, despite issues with acrylic shovel durability and heat-sensitive 3D parts. Key specs include a 5168.84 cm³ shovel, 150 m camera range, 2-hour battery life, and strong 4×4 traction, proving its practical value in environmental cleanup efforts.
Background
Northwestern Honduras, especially Puerto Cortés, faces severe environmental threats due to 600–700 tons of plastic waste annually flowing from Guatemala via the Motagua River. This pollution damages marine ecosystems, threatens tourism, and contributes to microplastic contamination— raising concerns that plastics could outnumber fish in the ocean by 2050.
Methodology
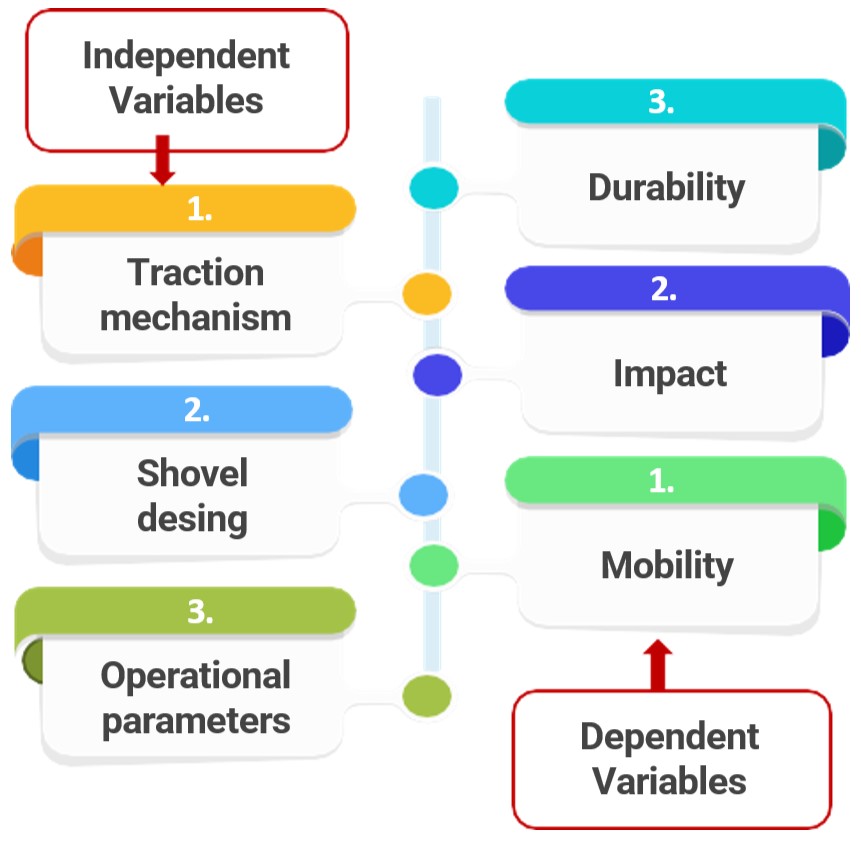
This investigation uses a mixed- methods approach, combining observational studies of beach pollution with quantitative analysis of robot performance metrics like debris collection, sand mobility, and cleanliness impact, ensuring a comprehensive evaluation of the problem and solution.
Figure 1. SandKBot: Prototype All-Terrain Vehicle for Beach Bottle and CanCollection
Results
Trials were conducted both at the university and in real beach environments to validate its functionality and adaptability. The final assembly, resulted in a complex yet functional and visually appealing structure. Field testing demonstrated the robot’s ability to navigate small obstacles and effectively filter debris using its shovel. However, challenges arose: the acrylic shovel fractured again under stress, and several 3D-printed parts deformed due to heat exposure. These findings emphazise the need for a deeper designing and experimentation process.
Image 1. SandKBot: Prototype All-Terrain Vehicle for Beach Bottle and CanCollection
Image 2. SandKBot: Prototype All-Terrain Vehicle for Beach Bottle and CanCollection
Conclusions
The project focused on designing and constructing a remote-controlled vehicle casing for efficient beach waste collection, particularly in sandy conditions. The main objectives included ensuring stability on sandy terrain, avoiding sand accumulation, and enhancing system performance by separating control and power components.