Gesture-Based Control of an OMRON Viper 650 Robot
POSTER ELECTRÓNICO
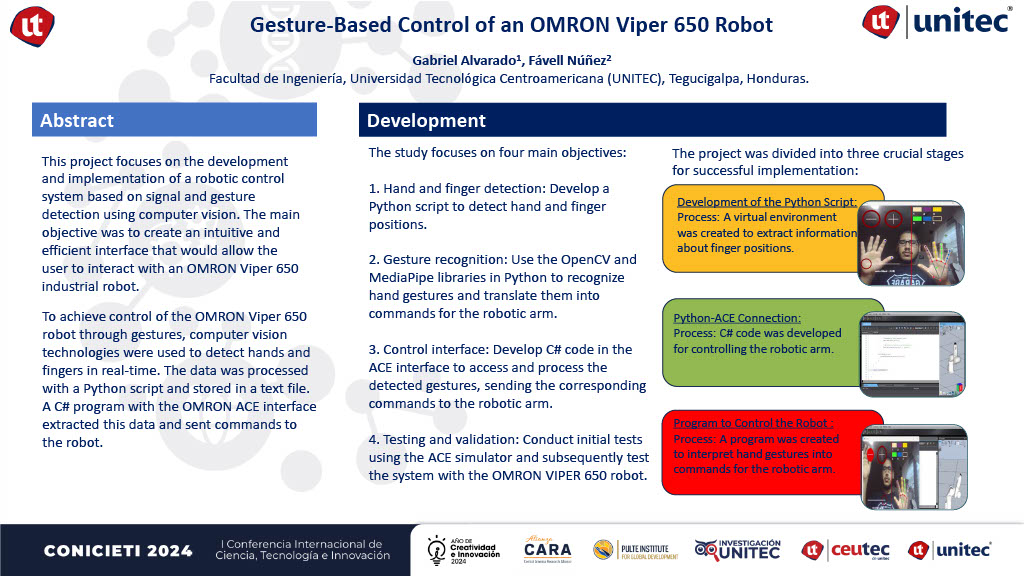
This project focuses on the developmentand implementation of a robotic control system based on signal and gesture detection using computer vision. The main objective was to create an intuitive and efficient interface that would allow the user to interact with an OMRON Viper 650 industrial robot. To achieve control of the OMRON Viper 650 robot through gestures, computer vision technologies were used to detect hands and fingers in real-time. The data was processed with a Python script and stored in a text file. A C# program with the OMRON ACE interface extracted this data and sent commands to
the robot.
Compartir