Ale-HAND-ra: Design and Development of a Low-Cost, Open-Source Humanoid Robotic Hand
- 1 Faculty of Engineering, Universidad Tecnológica Centroamericana (Unitec), Tegucigalpa, Honduras
- 2 Department of Computer Science, University of Texas at Dallas, Richardson, TX, USA
Contacto: [email protected]
Conflicto de interés: Sin conflictos
Ale-HAND-ra: Diseño y desarrollo de una mano robótica humanoide de bajo coste y código abierto
Abstract
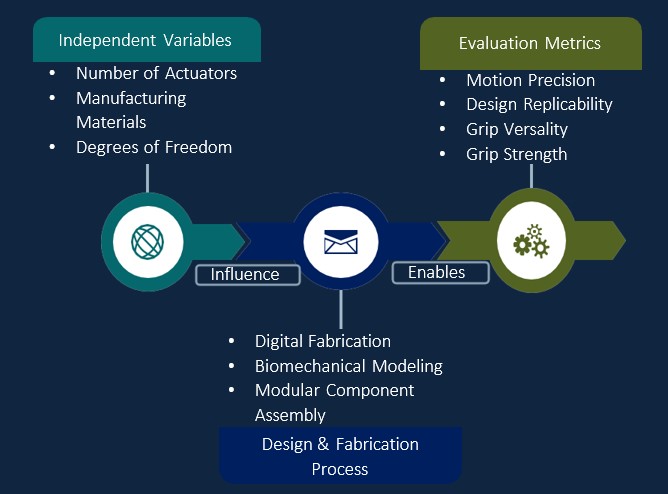
Ale-HAND-ra is a low-cost, open-source robotic hand with 20 degrees of freedom, designed for human-like functionality using affordable 3D printing methods. Based on biomechanical analysis, it offers precise motion and a 350g grip, making it ideal for educational, prosthetic, and robotic use. The achieved goal was to develop an affordable, open-source humanoid robotic hand, using digital fabrication tools, that accurately replicates human anatomy and functionality.
Methodology
Figure 1. Methodology
Results
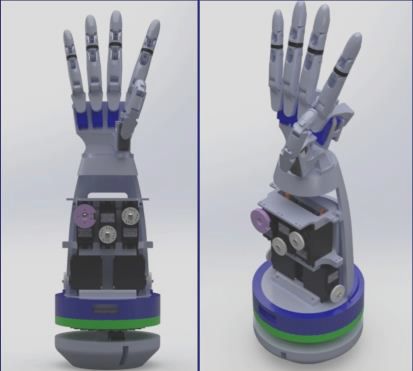
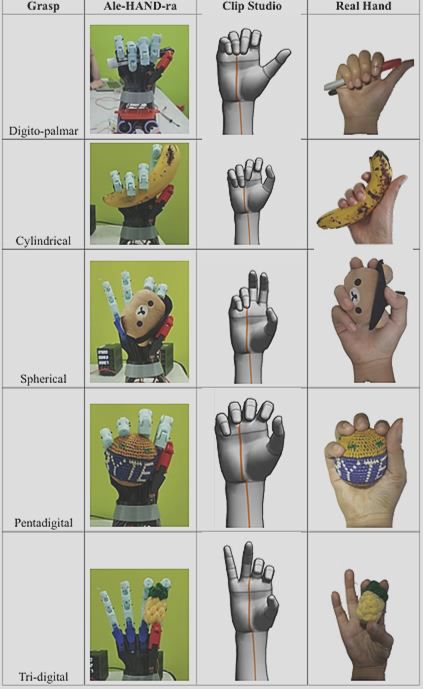
Ale-HAND-ra demonstrates the feasibility of building an affordable humanoid robotic hand that replicates human anatomy and function. Through digital fabrication and 3D printing, a modular and durable prototype with realistic movement was developed, guided by anatomical and kinematic analysis validated through simulations. Its servomotor-based non-holonomic control system enables complex, human-like motions. Balancing functionality, durability, and cost, Ale-HAND-ra supports applications in education, prosthetics, and robotics, with its open-source resources available on GitHub.